
Previously @Palantir...
Modeling ObjectivesEthical Principles in AI/ML
Ontology Search & Discovery
Prior to that @...


Iris Rover
Duration
Fall ‘19 - Spring ‘21
Skills
UX / UI, Developer testing, Interdisciplinary teams, Design systems
Role
Teleops Interface Design Lead (’20-21) & Map Designer (’19-20)
Collaborators
Teleops Design Team
Fall ‘19 - Spring ‘21
Skills
UX / UI, Developer testing, Interdisciplinary teams, Design systems
Role
Teleops Interface Design Lead (’20-21) & Map Designer (’19-20)
Collaborators
Teleops Design Team
Project Background
In 2017, Astrobotic and Carnegie Mellon University were selected by NASA’s Small Business Innovation Research to receive funding to develop a small lunar rover architecture capable of performing small-scale science and exploration on the Moon and other planetary surfaces. Carnegie Mellon University is the first university in the world to fully develop a lunar rover and the first American entity to successfully pilot an unmanned lunar vehicle.
The purpose of these small lunar rovers, or Cuberovers, was to help create a standardized system for 1) expediting space exploration through the ability to create modular components tailored to each mission and 2) reducing the pricy cost that comes with building large space rovers.
Iris is the first of the derivatives of Cuberover, developed by CMU students, set out for a deployment in 2021 on Astrobotic’s Peregrine lander.

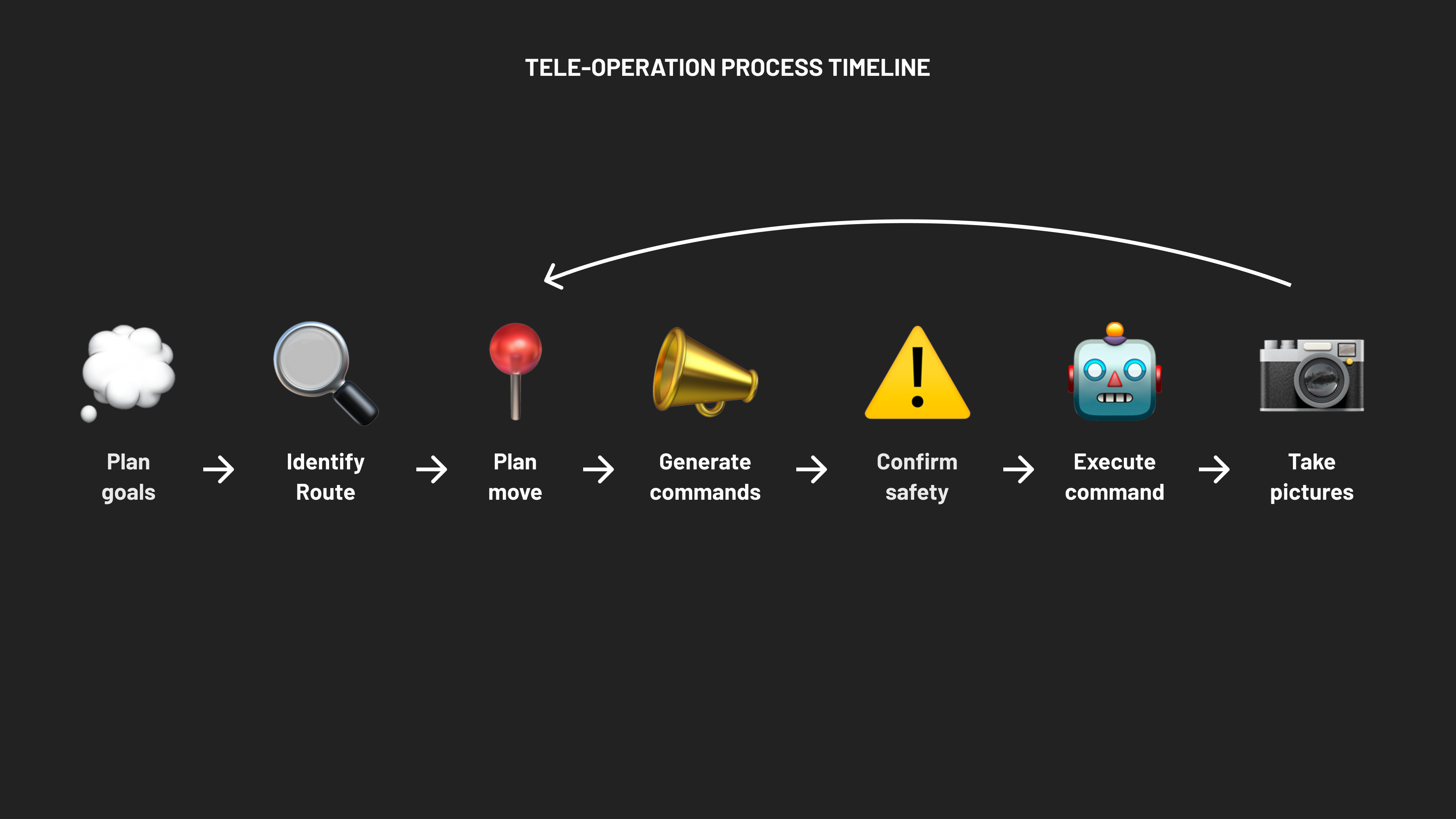
Project Scope
“Tele” means to or at a distance. “Operate” means to control the functioning of. Iris Teleoperation Design team is responsible for teleoperating the rover to successfully accomplish the lunar mission set out by scientists. To successfully accomplish this, there needs to be several features: command line, image viewer, map, telemetry, and error analysis.
High level organizational chart of the different Operator Roles during the Lunar Flight and Exploration Mission
There are several different teams and stakeholders involved during this complicated mission process. Each role during the mission is representative of a larger team that is crucial for executing the mission - science, communications, ground testing, operations, robotics. Visualizing each role and it’s relation to other parties helps form a mental model in designing how the operation is to be conducted.
There are several different teams and stakeholders involved during this complicated mission process. Each role during the mission is representative of a larger team that is crucial for executing the mission - science, communications, ground testing, operations, robotics. Visualizing each role and it’s relation to other parties helps form a mental model in designing how the operation is to be conducted.

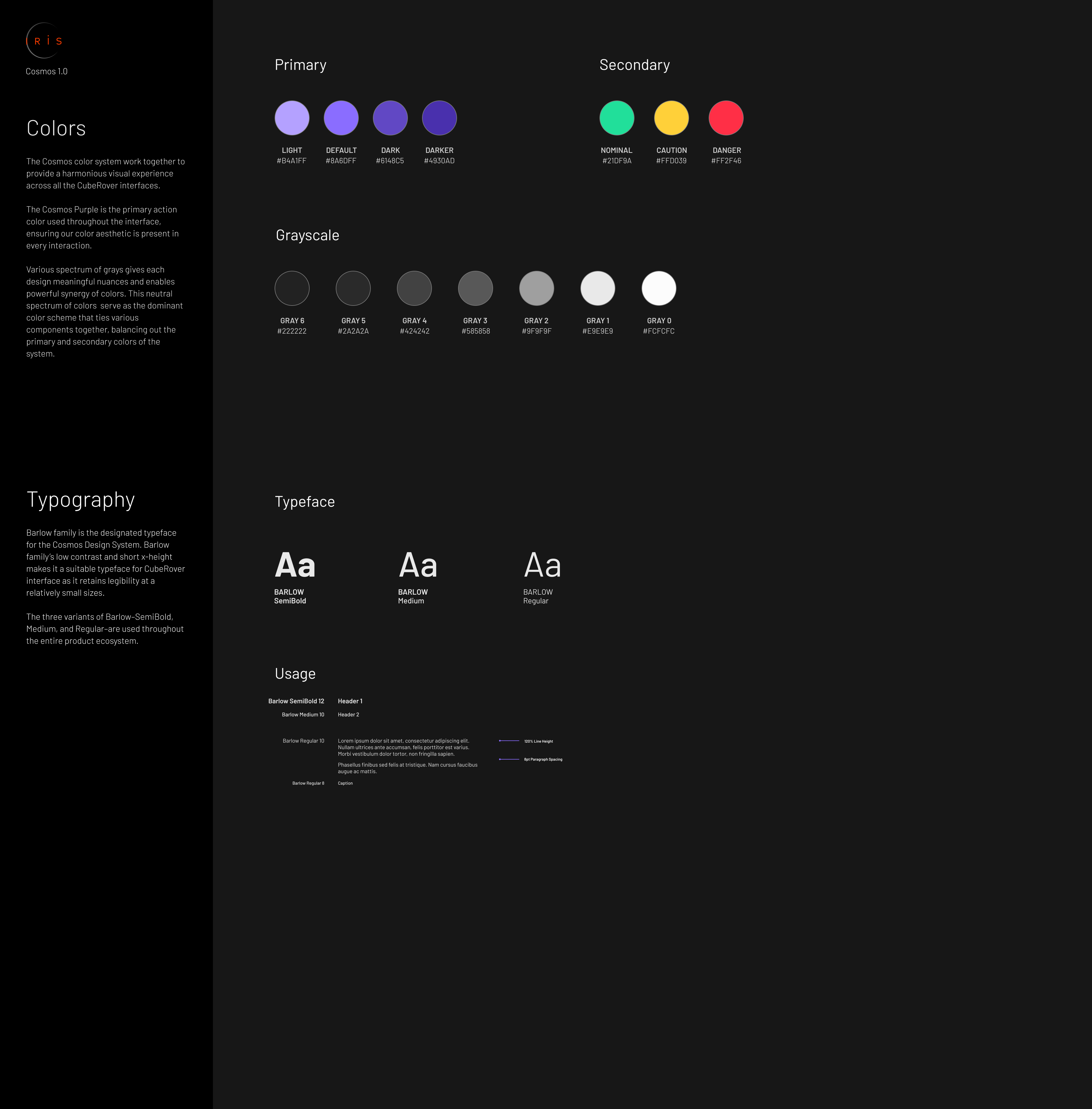
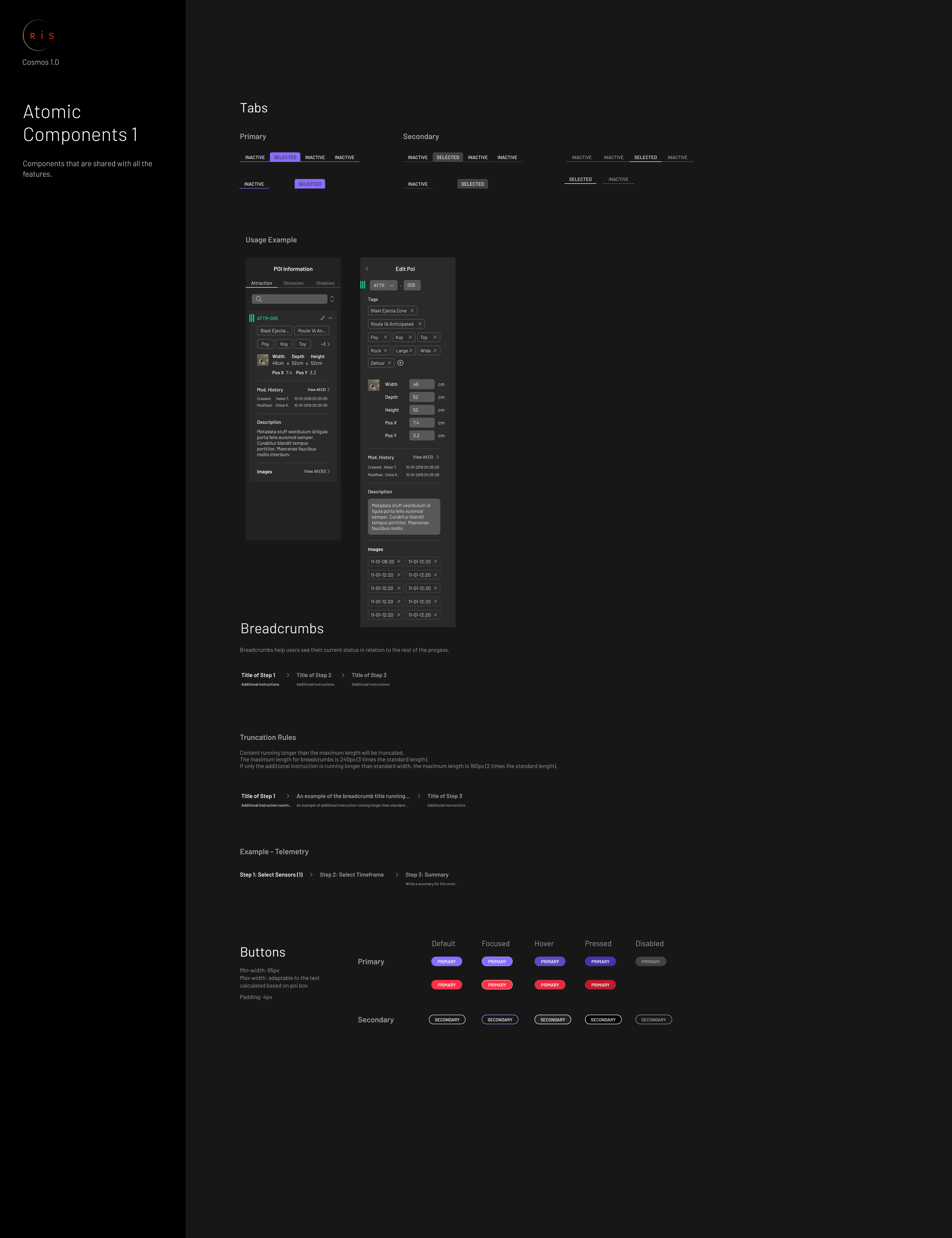
Cosmos Design System
We created a design system to ensure that all designs could be scalabe and cohesive among all Ground Software Interface features. (Pictured: colors, typography, & iconography). Additionally, some components serve universally among the interface, and each track also has mission-specific components.

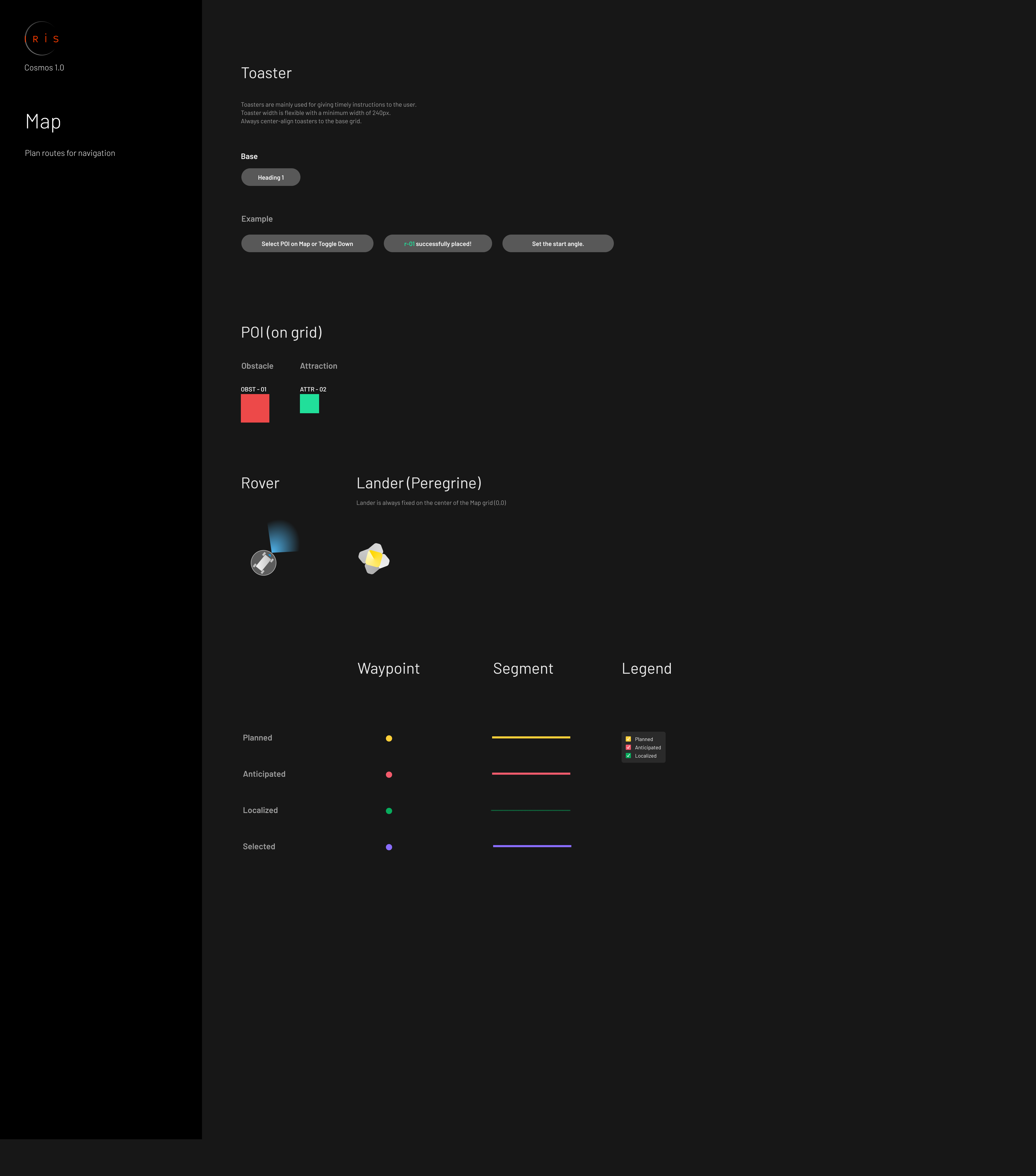
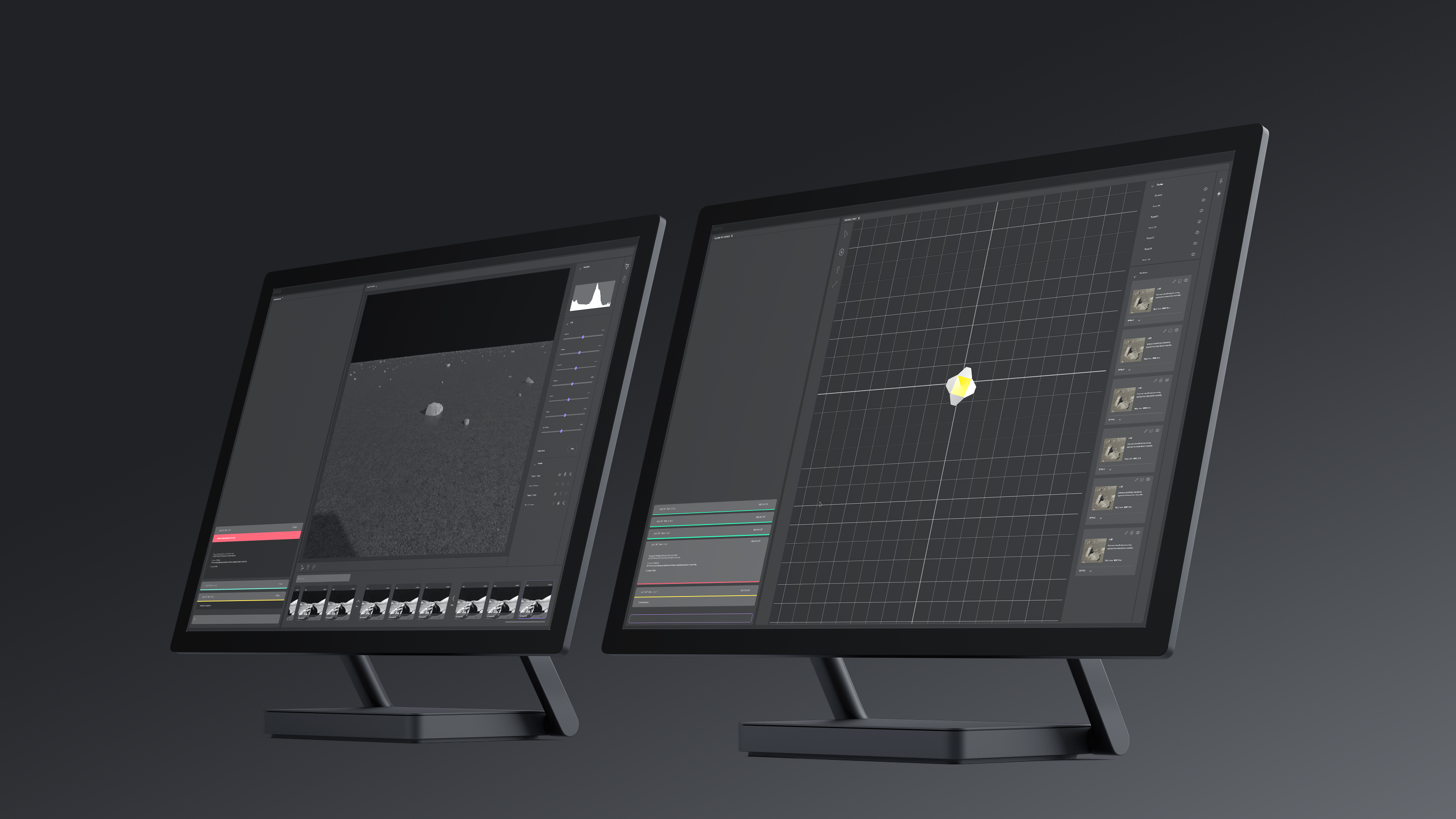
Map Feature
Map is one of the five main features of the Ground Software system. Map is responsible for localizing the rover, plotting POI’s, and route management (planning, in-progress, and executed).
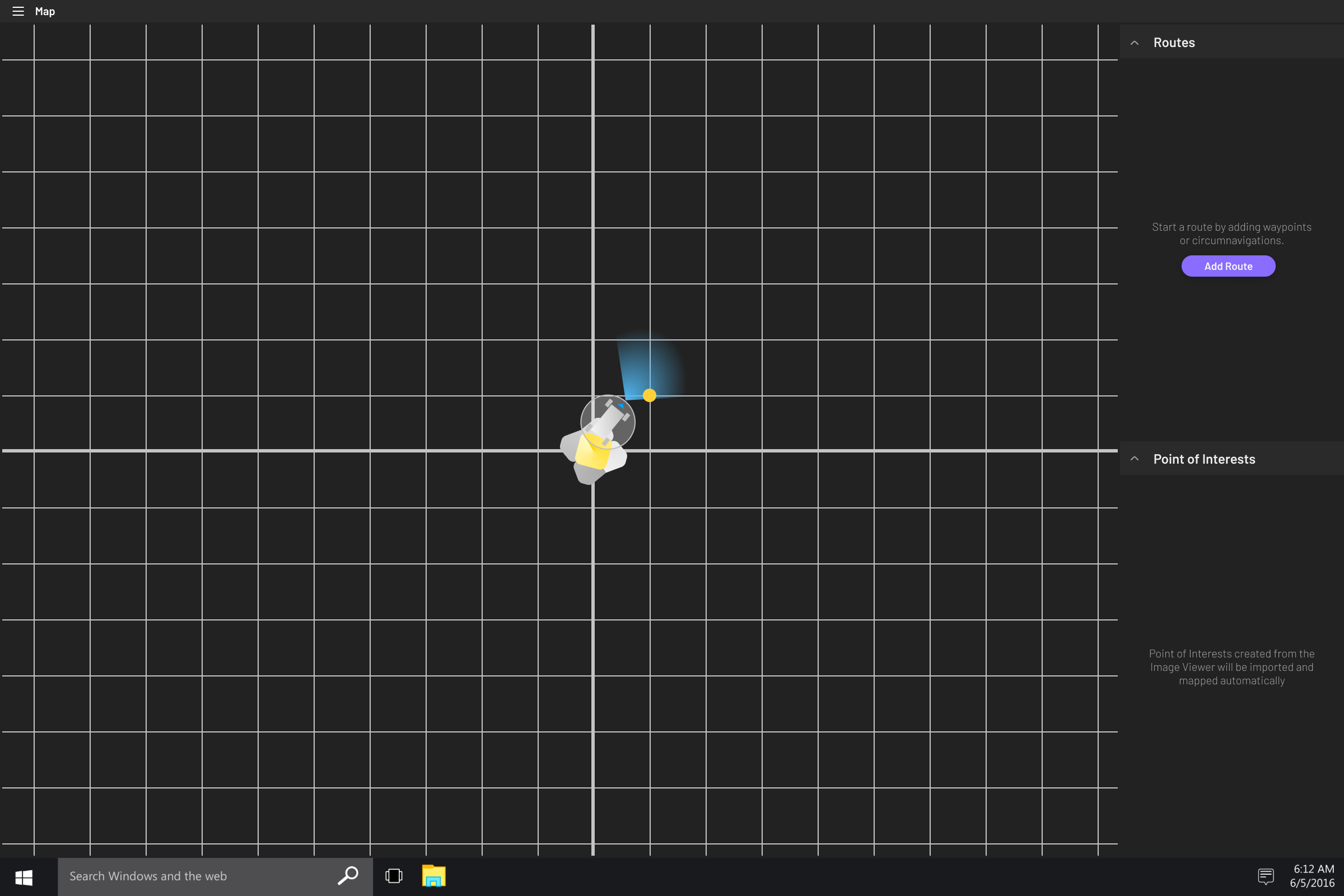
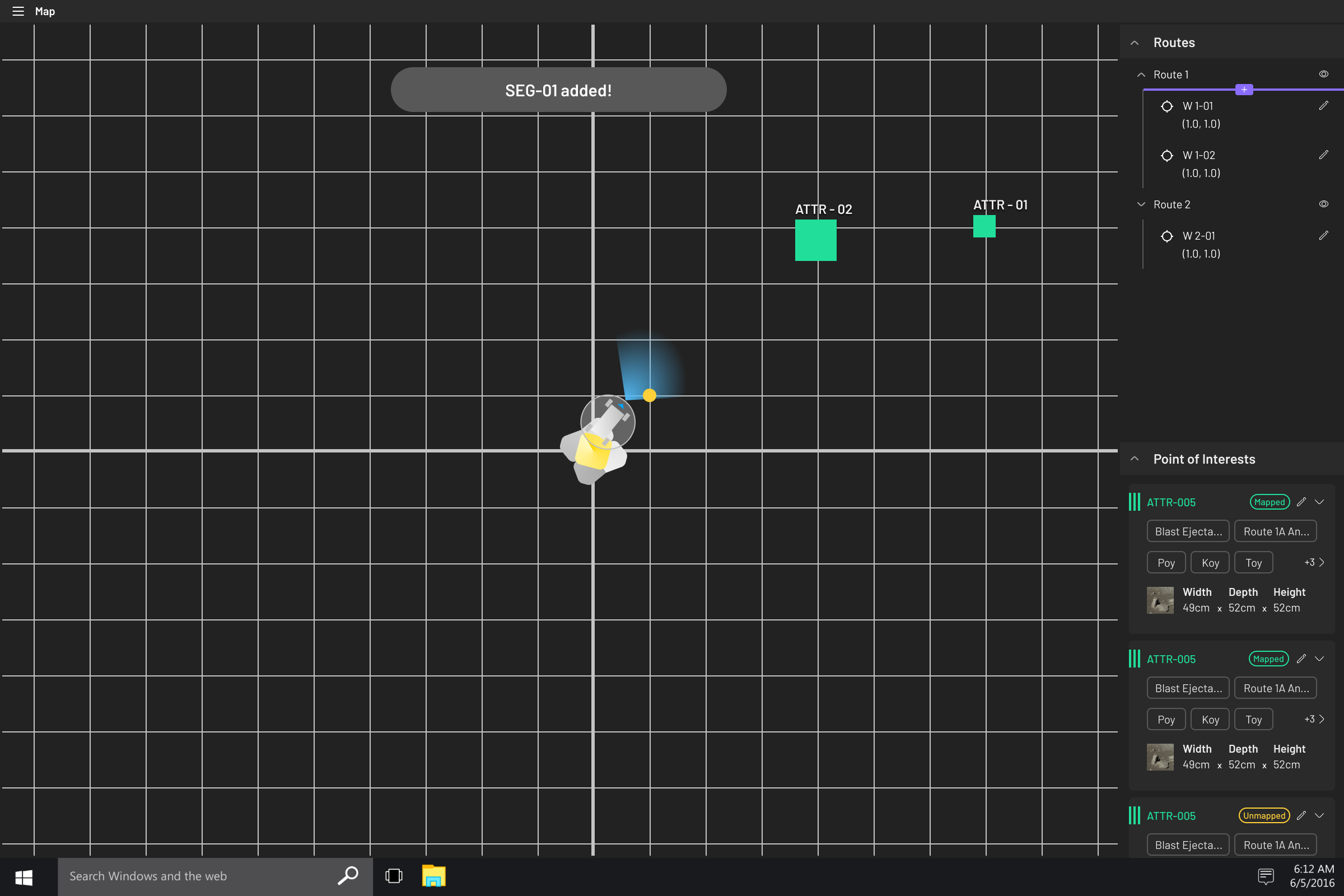
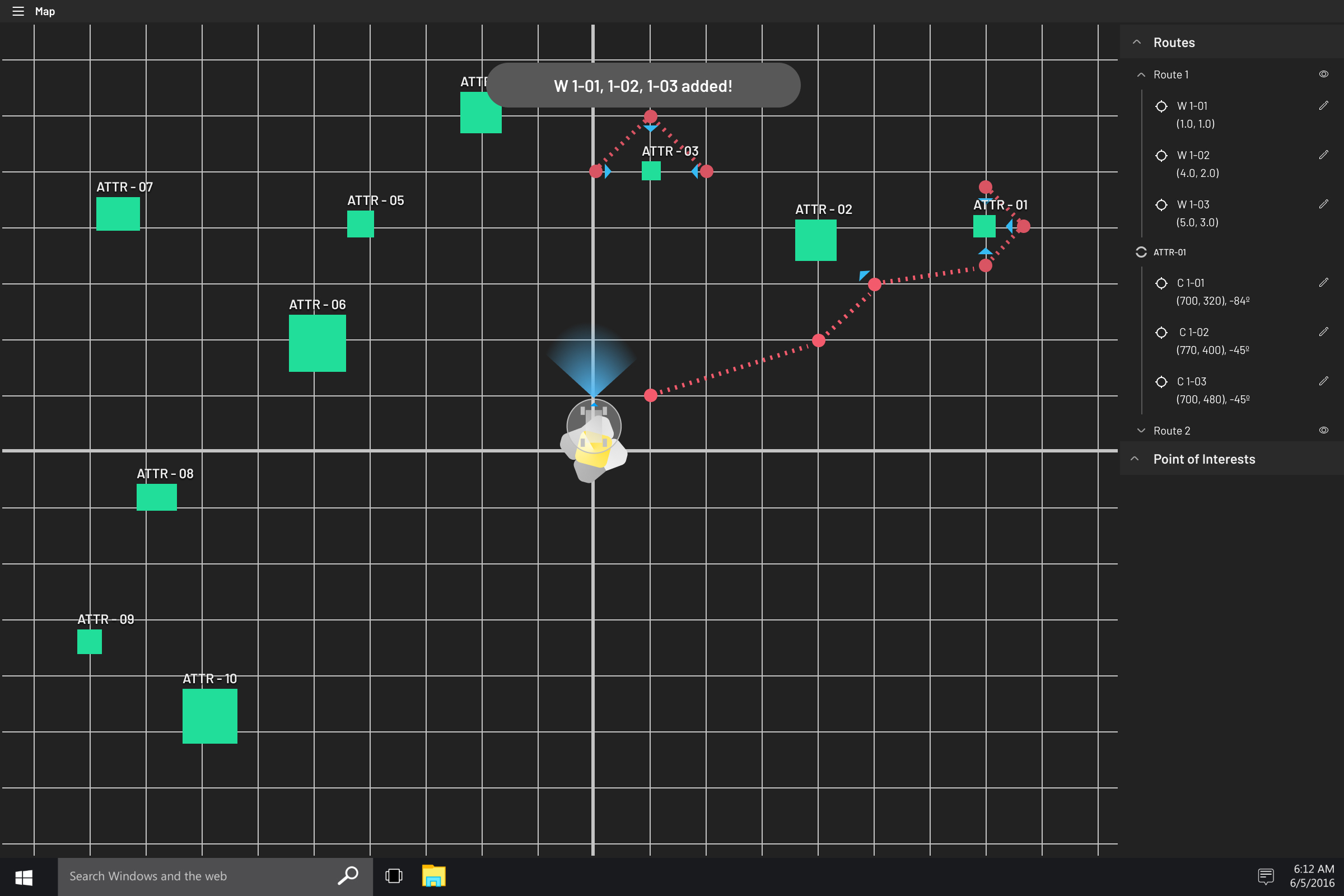
Map: Manage Routes
Science team can add routes and/or waypoints to the route manager by sliding the purple bar using the mouse, or using shortcuts on the Keyboard. Flexibilty in managing the routes at any waypoint or cicumnavigation allows for straightfoward route editing, which is crucial as we discover and map the terrain concurrently.
Map: Add Waypoint
Waypoints are one of the two types of components that make up a route. Waypoints refer to general points on the map that the rover goes to, and consists of paths that are automatically broken down into sizable chunks to ensure the safety of the rover and mission.
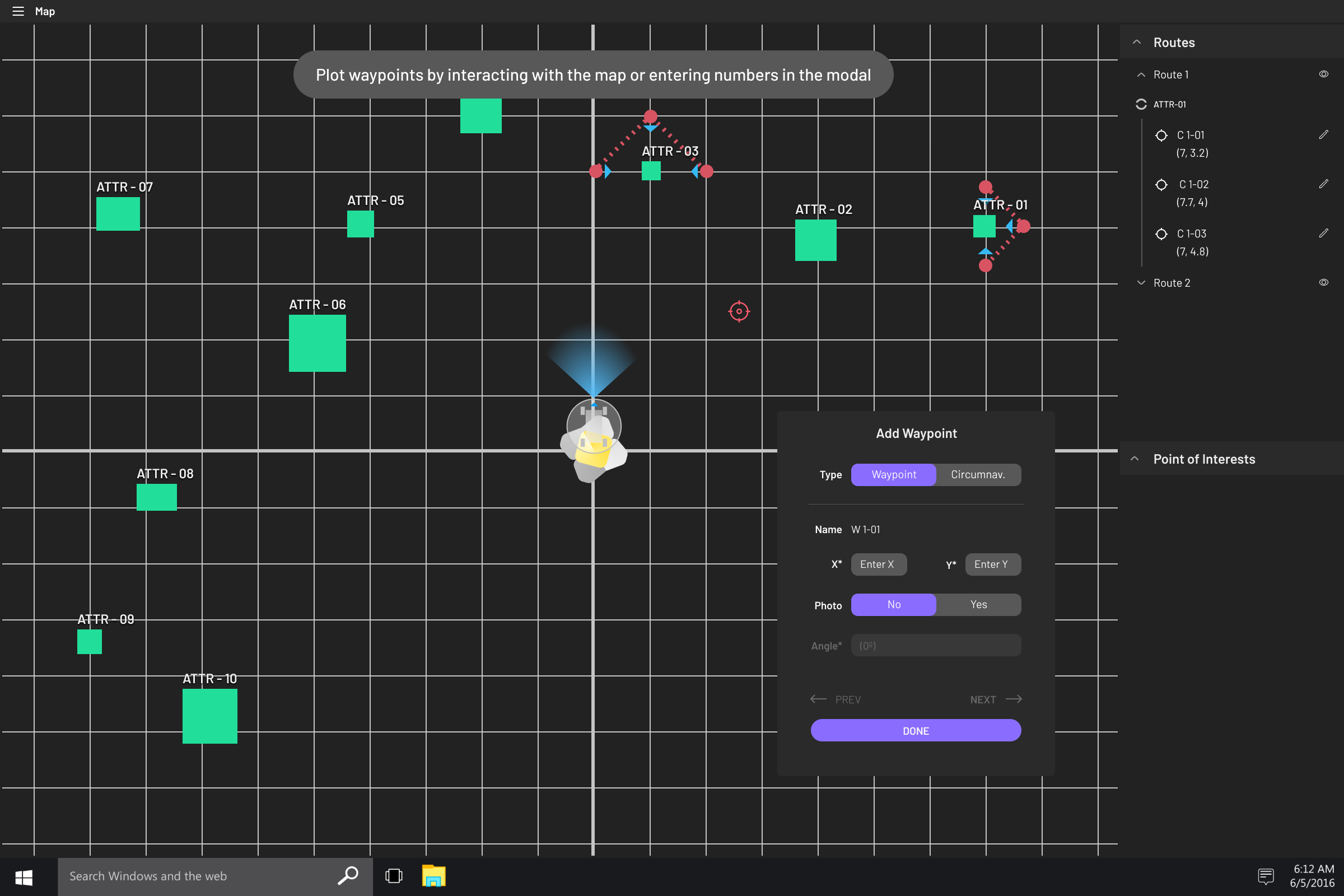
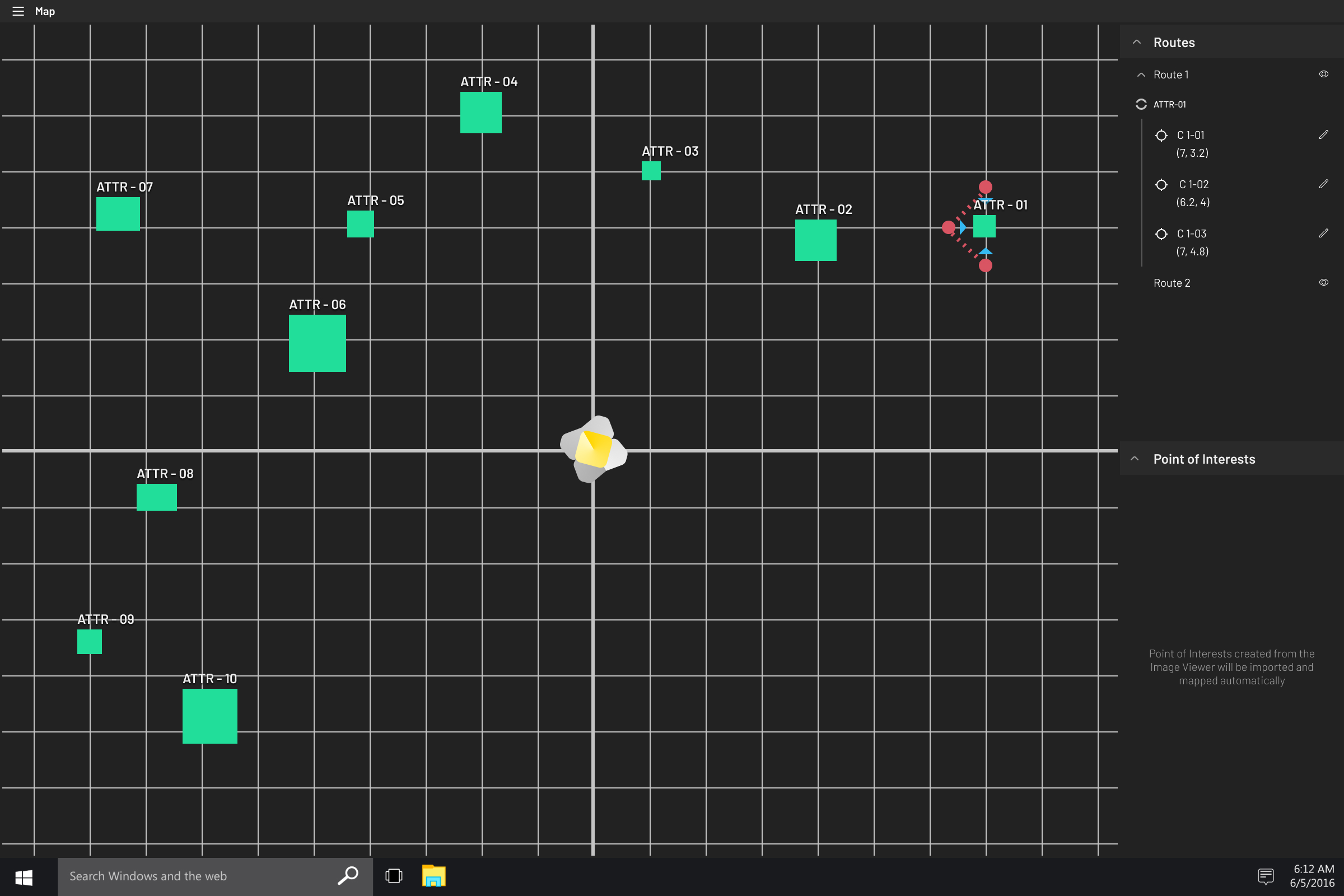
Map: Add Circumnavigation
Identifying and marking places on the map that are worth further inspecting. Circumnavigations are rotations around a specific Point of Interest. During these rotations, the rover will take pictures of the Point of Interest from multiple angles, which is an automated process during the plotting process of circumnagvigations.

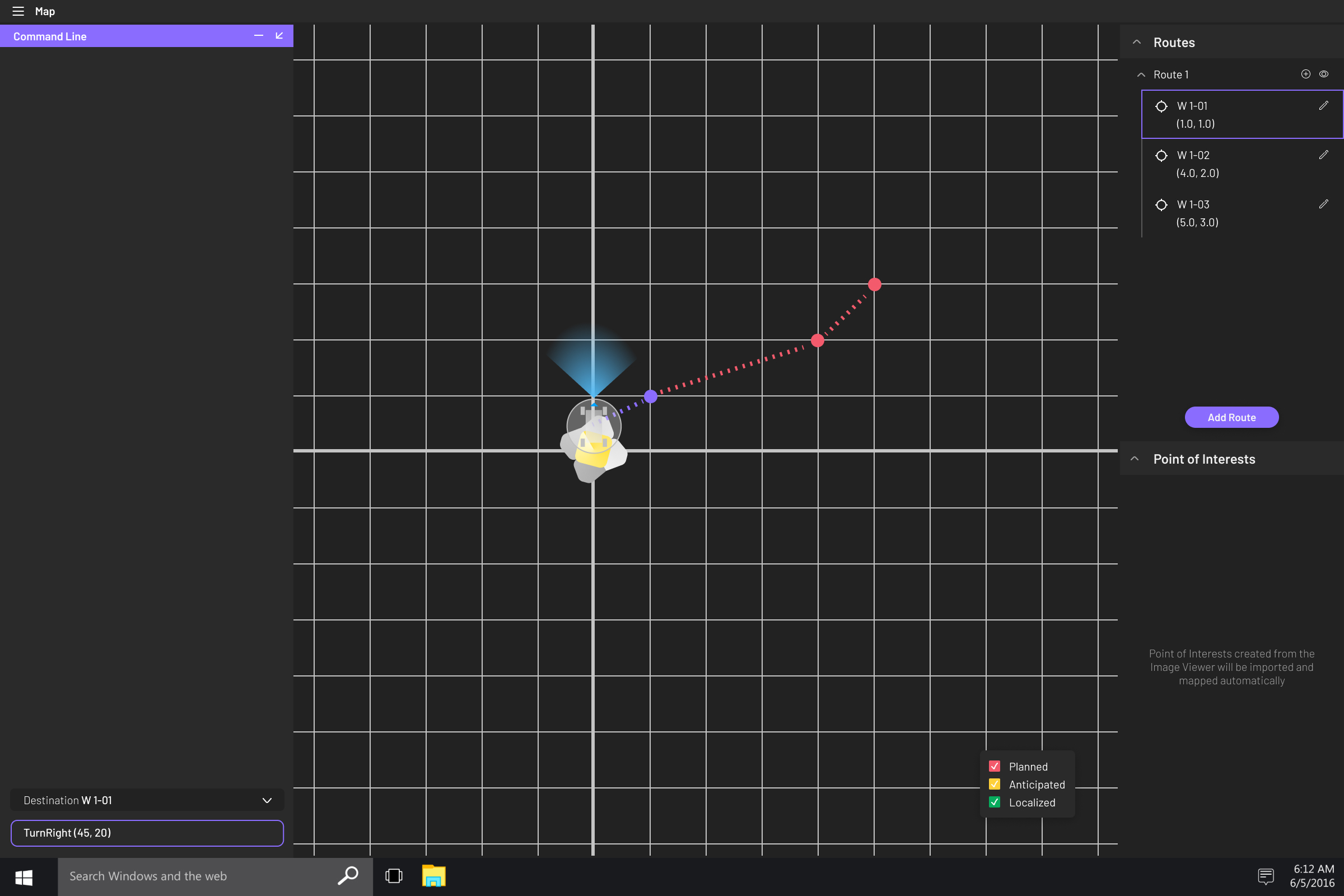
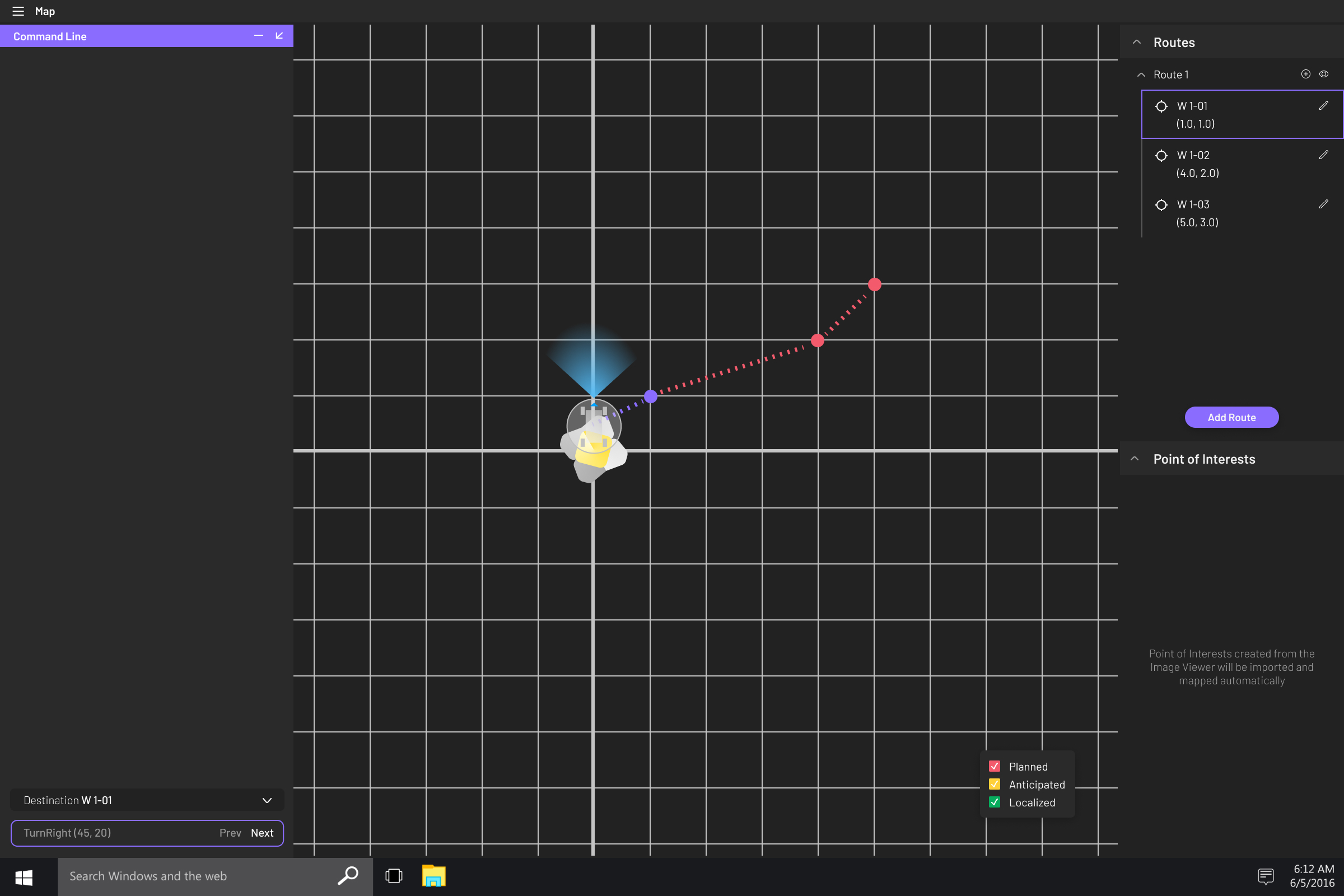
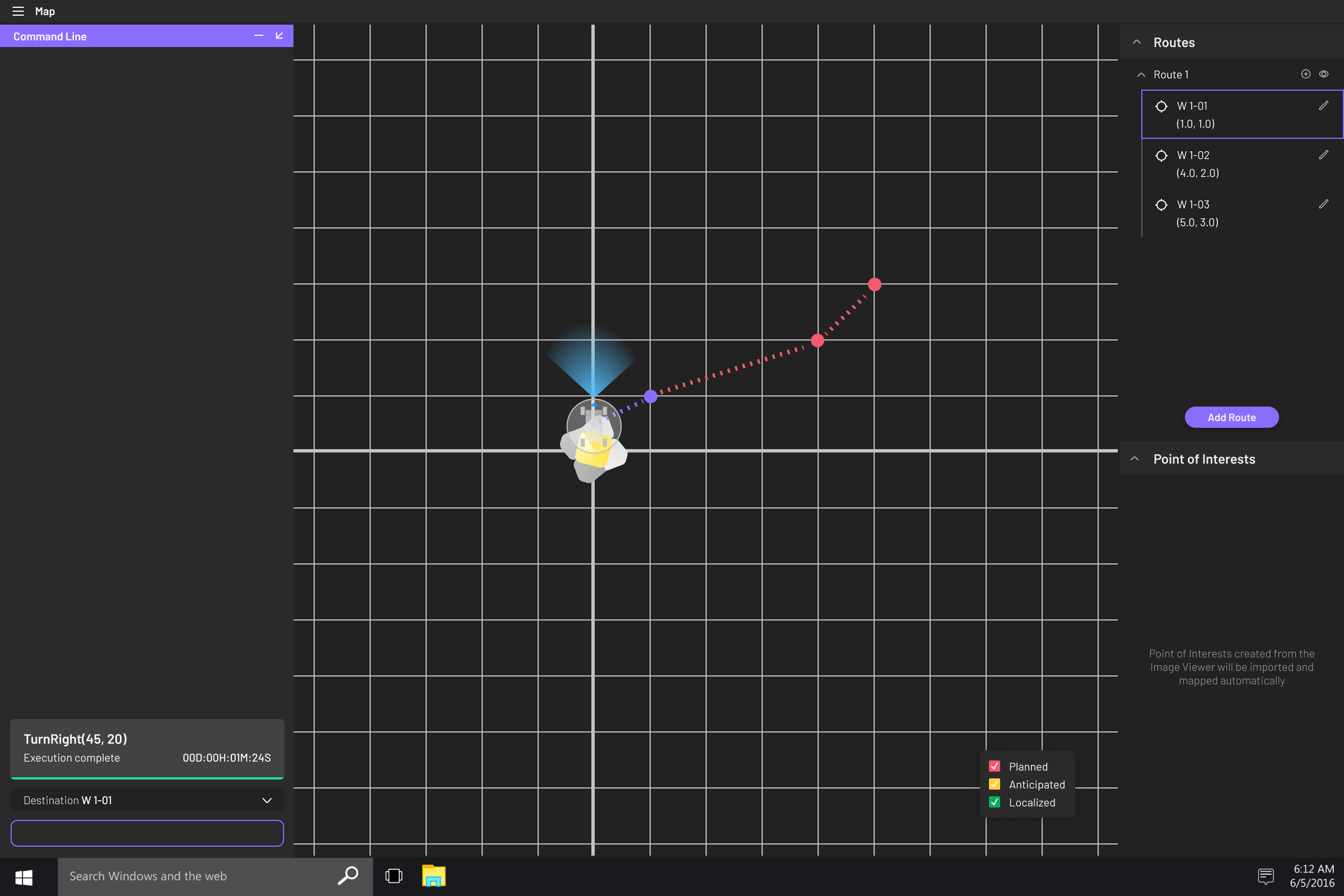
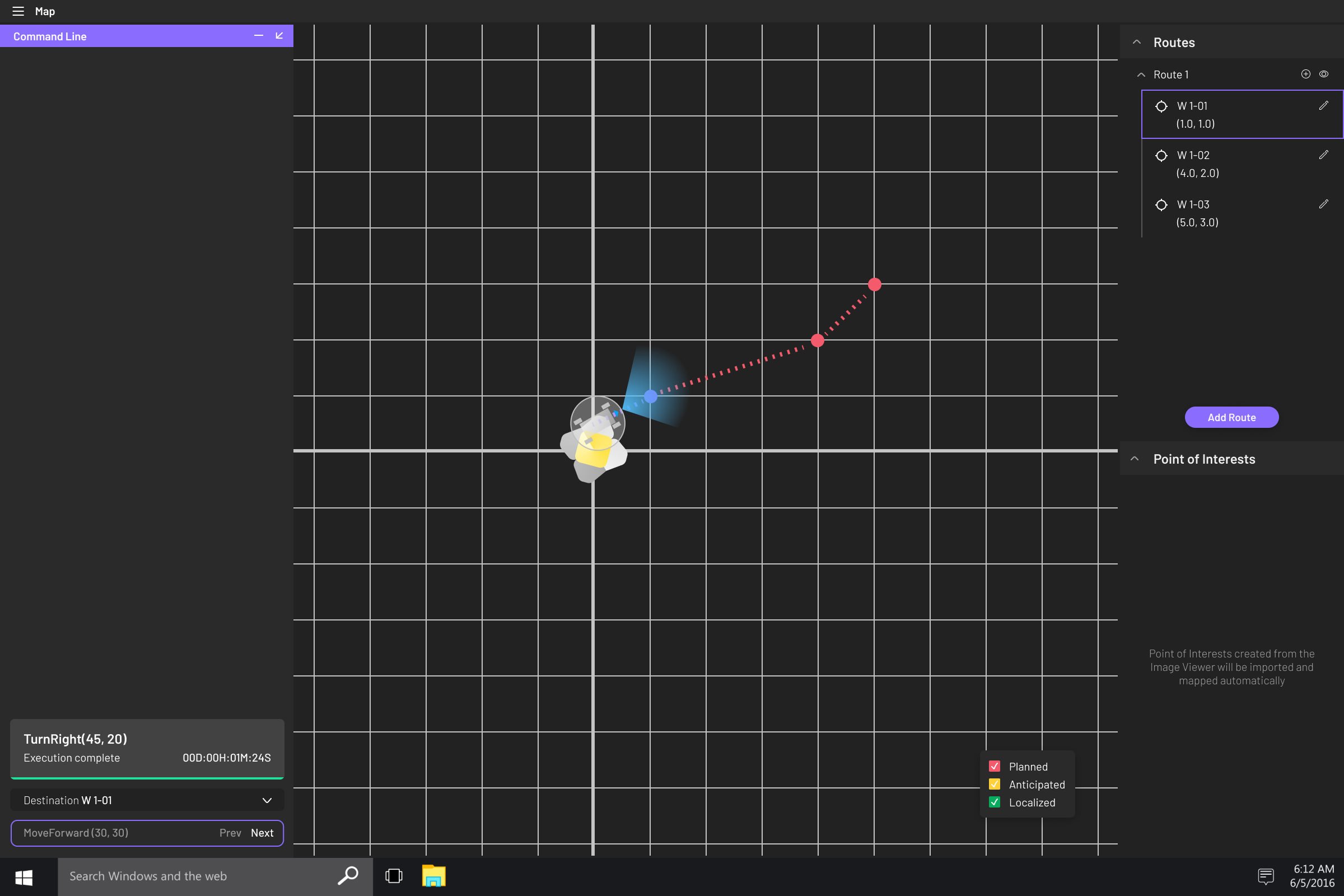
Map: Suggest Commands
Command Line most often exists alongside the map interface, to plan and execute the mission. Auto-fill helps guide commanders on the right path of typing out commands.

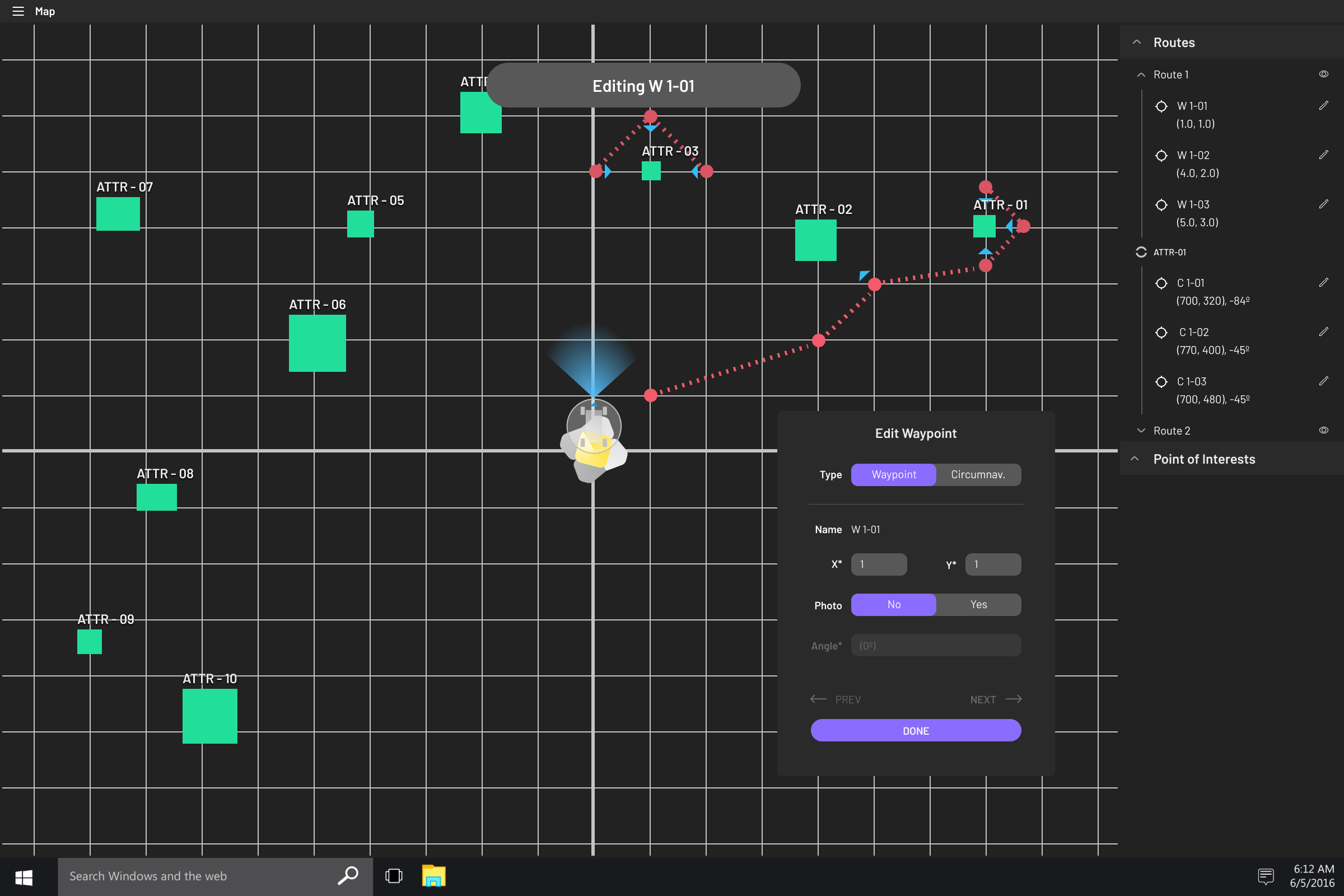
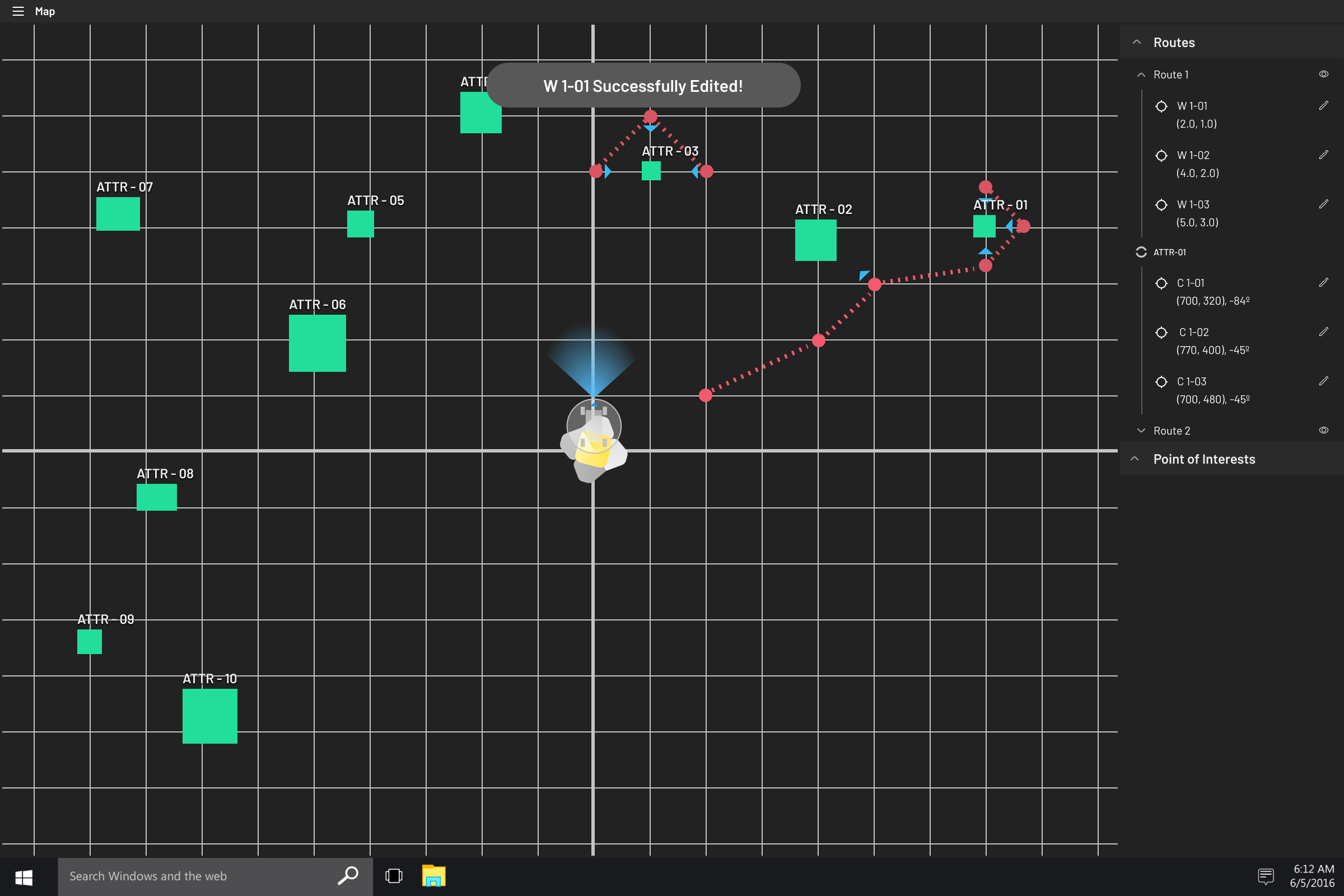
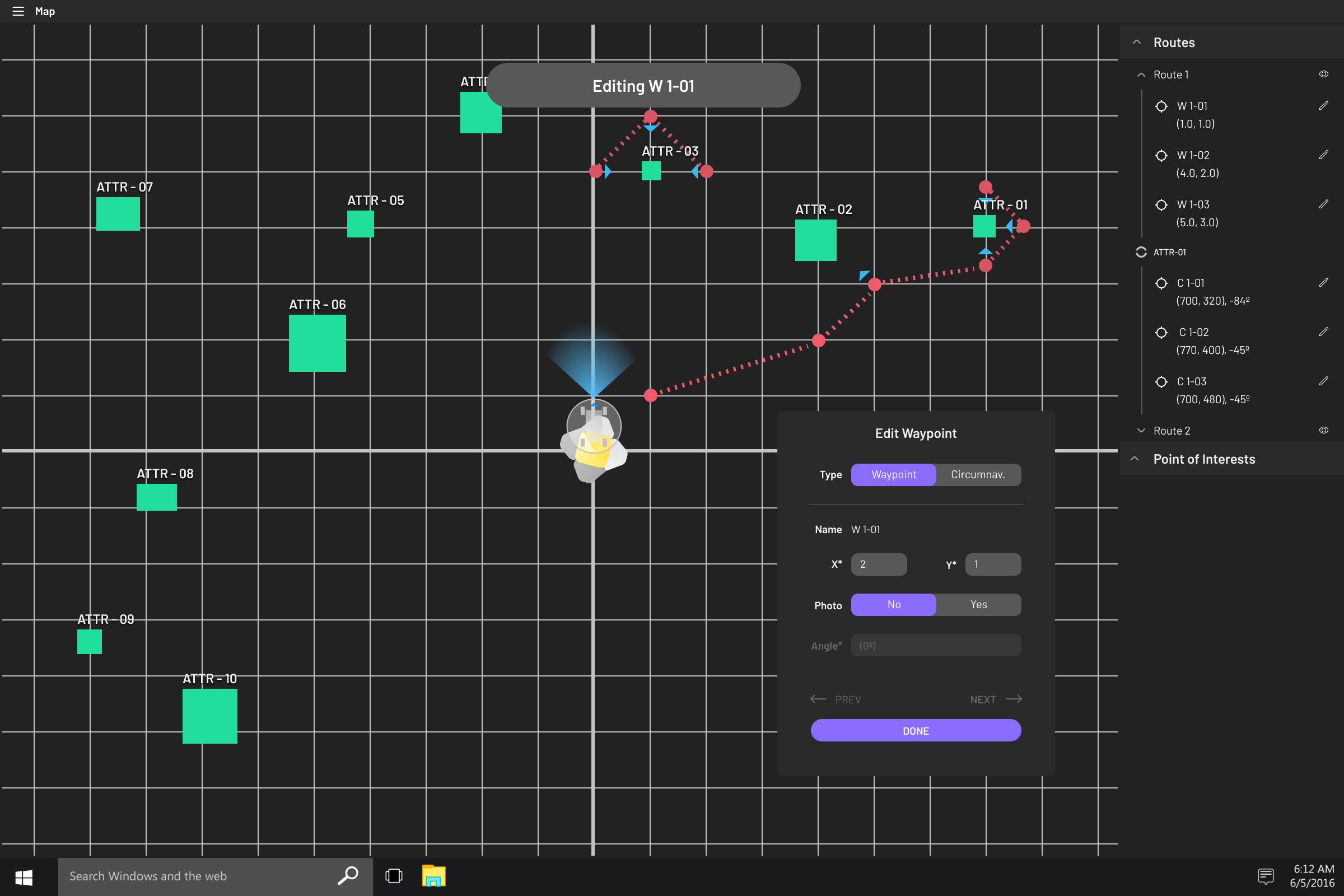
Map: Edit Waypoints
As we progress on the mission, the more we shape and understand the terrain. Going back to edit the waypoints is crucial in safe moves, and when mission goals shift. Editing waypoints is a similar modal to the adding waypoints.
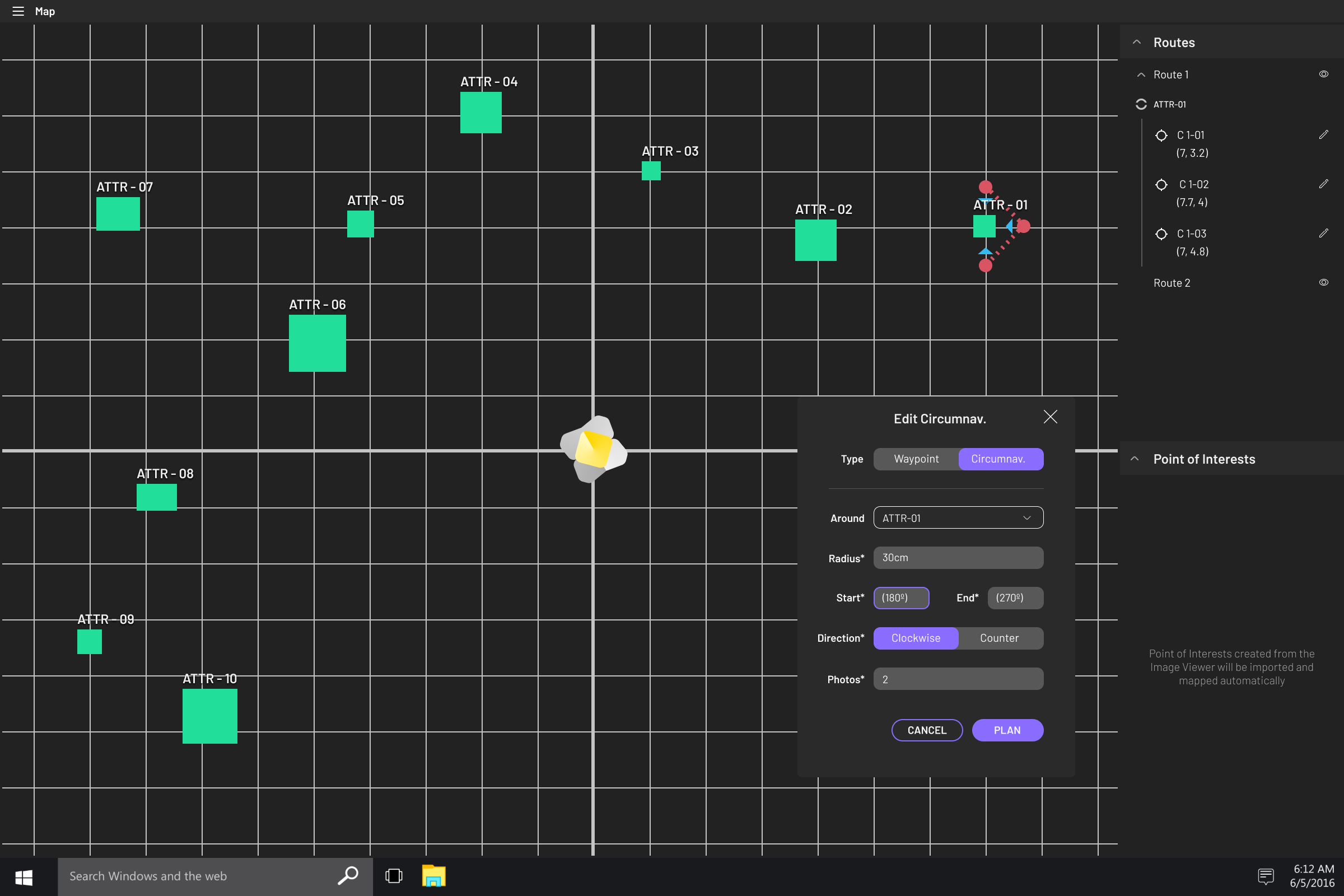
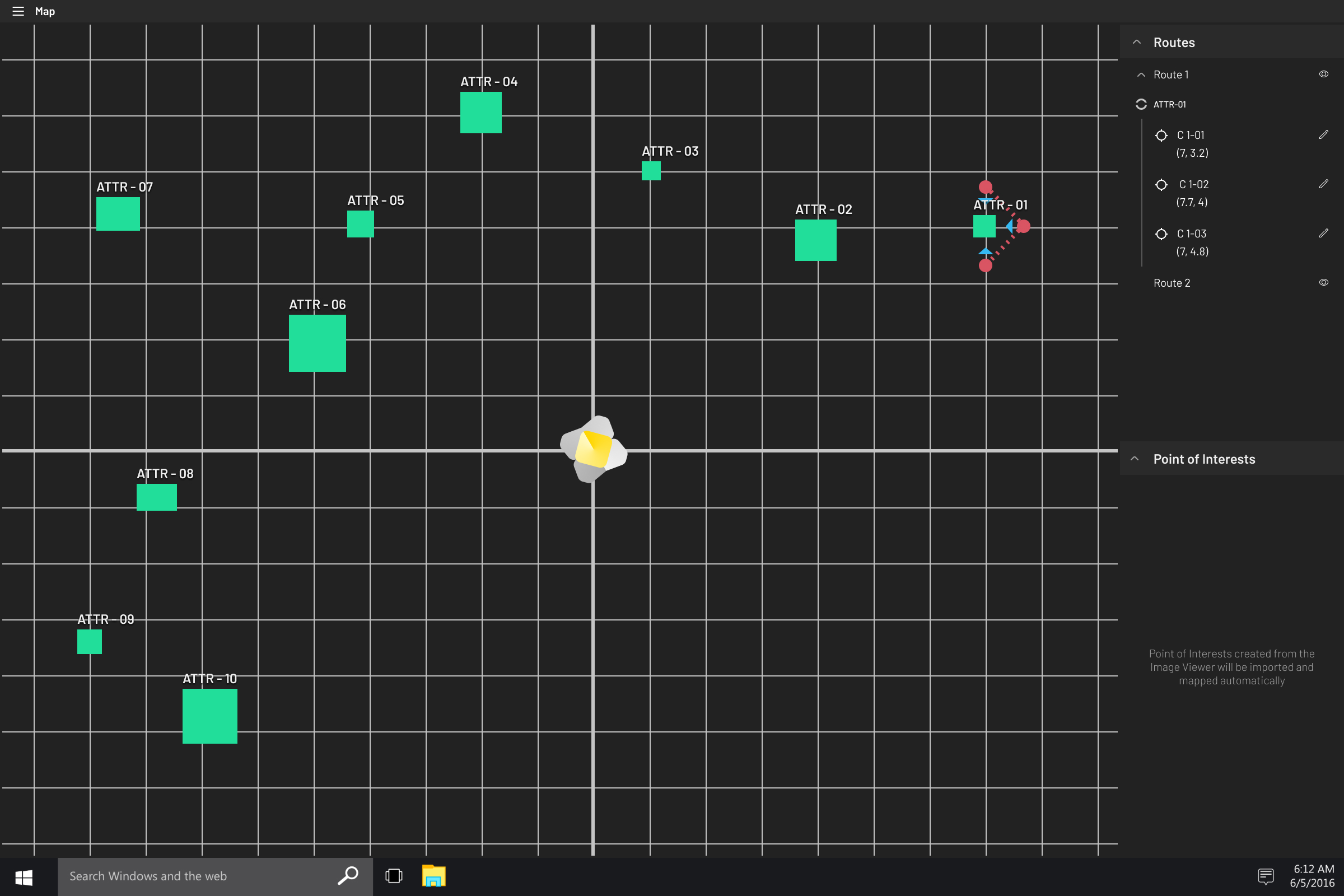
Map: Edit Circumnavigation
Editing circumnavigation uses the same modal interface as editing waypoints. Toggling the type from waypoint to circumnavigation allows commanders to quickly and familiary switch over editing stations.

The Iris Rover team!
Thankful to be working with such a talented, hardworking, and unique crew.
🌟For NDA purposes, I’ll have to end the exciting stuff here, but feel free to reach out to me for more information! 🌟